
How can auto makers break free from the limitations of traditional automotive software frameworks and build scalable architectures? Phani Gangula, senior solutions architect at ZettaScale Technology discusses the essential building blocks
With the rise of software-defined vehicles, the automotive industry is rapidly transitioning toward a software-centric environment. Traditionally, the development of automotive applications has been centered around frameworks like AUTOSAR Classic and AUTOSAR Adaptive.
The AUTOSAR Classic’s rigid structure makes it challenging to adapt to new technologies and evolving requirements whereas AUTOSAR Adaptive introduces a more complex and resource-intensive software architecture that increases development time and effort, as well as the overhead associated with running the software on the vehicle’s hardware. Although AUTOSAR is a widely adopted standard, the complexity of the standard can slow down vehicle software development and potentially limit the overall performance. Developers ought to focus on developing functionality, shouldn’t they?
ZettaScale looks into some of the challenges of developing automotive applications in AUTOSAR and how adopting its Eclipse Zenoh as a transport layer would enable industry players to quickly build their custom frameworks that would allow their engineering teams to build efficient, adaptable and ever-evolving automotive applications.
The complexities and challenges of AUTOSAR
AUTOSAR comes with a steep learning curve with its intricate architecture that includes concepts such as virtual platforms (VPs) and software components (SWCs), and an extensive configuration process that would burden engineering teams and lead to longer development cycles and delays in start of production (SOP). Delays could cause estimated annual losses of US$30bn to US$50bn for the entire industry.
AUTOSAR offers a vast array of features but not all are necessary for every project. Including unnecessary functionalities can bloat code size and strain ECU processing power (for instance, supporting unused communication protocols).
The sheer volume of configurable parameters (memory allocation, GUI tools, communication stacks) makes development and maintenance cumbersome. Deep understanding is required to avoid errors. Furthermore, inconsistencies in vendor interpretations of the AUTOSAR standard can lead to integration issues between components from different sources.
AUTOSAR tools generate large amounts of code from configuration files, but the lack of transparency makes troubleshooting and understanding system behavior difficult. Additionally, the large and complex ARXML files used for configuration pose parsing challenges, further complicating development that does not allow you to adopt modern software development workflows.
Building blocks for efficient frameworks
Zenoh provides a unified approach to deal with data in motion, data-at-rest, and computations through Pub/Sub/Query communication mechanisms. Zenoh provides a single communication solution that can run smoothly from MCU to ECU and to the edge or cloud infrastructure, without compromising throughput or latencies.
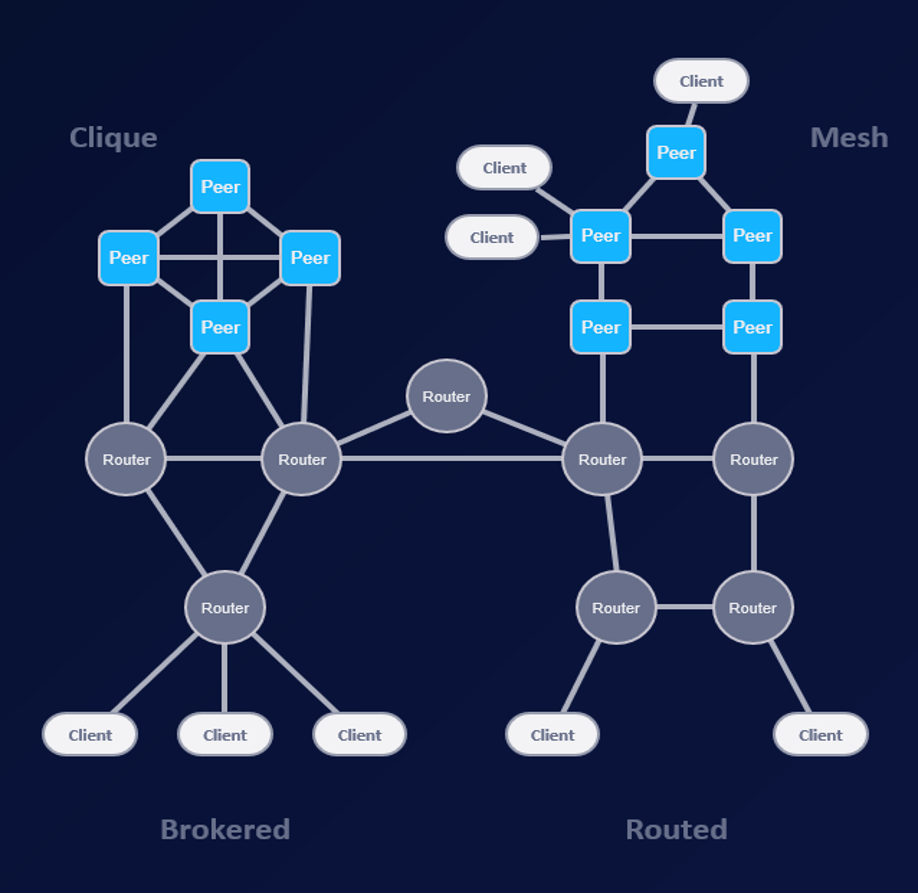
Zenoh supports peer-to-peer, routed and brokered communication, thus supporting the most appropriate communication model in the cloud-to-thing continuum. Thanks to Zenoh’s mesh routing capabilities, Zenoh routers provide flexible V2X communication that can effectively handle failovers and provide automatic load balancing mechanisms. Zenoh distributed storages enable users to query the data without any concerns on the actual location of data, thereby making it a best-suited protocol to query the safety relevant data at any given point. Together, Zenoh eliminates the need of patching various communication technologies by providing an integrated framework for V2X communication and data management.
Furthermore, it’s easily extensible, as users can add databases to query or even bridge any protocol of choice (for example MQTT, DDS, CAN and SOME/IP etc), hence supporting the legacy systems.
Zenoh transcends traditional boundaries, providing built-in support for inter-process, inter-OS zero-copy shared memory and even custom network link communication for inter-chip communication. This enables integration of a diversity of applications, including safety-critical ones within a single framework. Zenoh prioritizes low-latency communication for critical data while supporting dynamic as well as static discovery. This enables vehicles to connect within the vehicle and around its surroundings intelligently, enabling real-time decision making for features such as autonomous and assisted driving.
Streamlining the data flow pipeline
Zenoh-Flow, a data flow programming framework on top of Zenoh, meticulously schedules data flows, minimizing latency and ensuring critical data is processed on time. This deterministic behavior is crucial for the safety and reliability of autonomous vehicles. Zenoh-Flow provides modularity by representing functionalities as independent operators. It simplifies development, maintenance and integration of new features. As functionalities evolve, new operators can be easily added, making Zenoh-Flow a scalable solution for data processing needs. These operators can span the vehicle-to-cloud continuum, so users can integrate new functions seamlessly wherever needed and off-load processing tasks to edge or cloud infrastructure.
Functional safety guaranteed
Zenoh prioritizes safety without compromising functionality in the following ways:
- Meeting the highest standards: Zenoh is being certified up to ASIL-D safety standards, granting auto makers the confidence to leverage its features in safety-critical applications within their frameworks.
- Bridging the gap: It can also be seamlessly integrated with both Classic and Adaptive AUTOSAR environments. This ensures compatibility with existing systems while paving the way for a smooth transition to futureproof architectures.
The technology offers a number of benefits for the automotive industry to build comprehensive frameworks, including:
- Increased efficiency: A single technology to enable in-vehicle and V2X communication that is performant, wire-efficient, supports legacy systems and transport and is hardware agnostic, that directly saves development time, energy consumption and engineering costs.
- Improved performance: Zero-copy shared memory communication, extremely low latencies and high throughputs (batching) by supporting all the popular communication scenarios, including inter-chip.
- Enhanced safety and security: Zenoh core is based on Rust, ZettaScale’s technology designed to be secure and reliable, even in harsh conditions. At the same time, it provides an implementation that has a C core.
- Reduced complexity: An easy-to-use API (application programming interface), data-processing framework and Zetta PaaS offering makes it easier to design, develop, integrate and deploy automotive applications.
The road ahead
Zenoh is gaining widespread acceptance into other ecosystems and industry-standard frameworks like ROS2 and Autoware and among Eclipse SDV projects. A notable example is Eclipse uProtocol, a project spearheaded by General Motors, which provides a transport-agnostic, layered communication framework to unify applications and services from vehicle mechatronics up to the cloud. In uProtocol, Zenoh is integrated as a transport layer facilitating an architecture that can seamlessly enable communication between applications and services that are located anywhere across the vehicle-cloud continuum.
A simple API and powerful abstractions that form building blocks enable car makers to break free from the limitations of traditional frameworks and build scalable architectures that facilitate the development of mixed-criticality applications spanning the vehicle-to-cloud continuum.


